Projects
I’ve worked on a range of projects that blend mechanical design, electronics, and programming. Here are a few highlights:

10-inch autonomous quadcopter
Designed a 10-inch quad from scratch with custom carbon-fiber frame, 8S powertrain, and full ArduPilot tuning from first stable flight to guided autonomous operation.

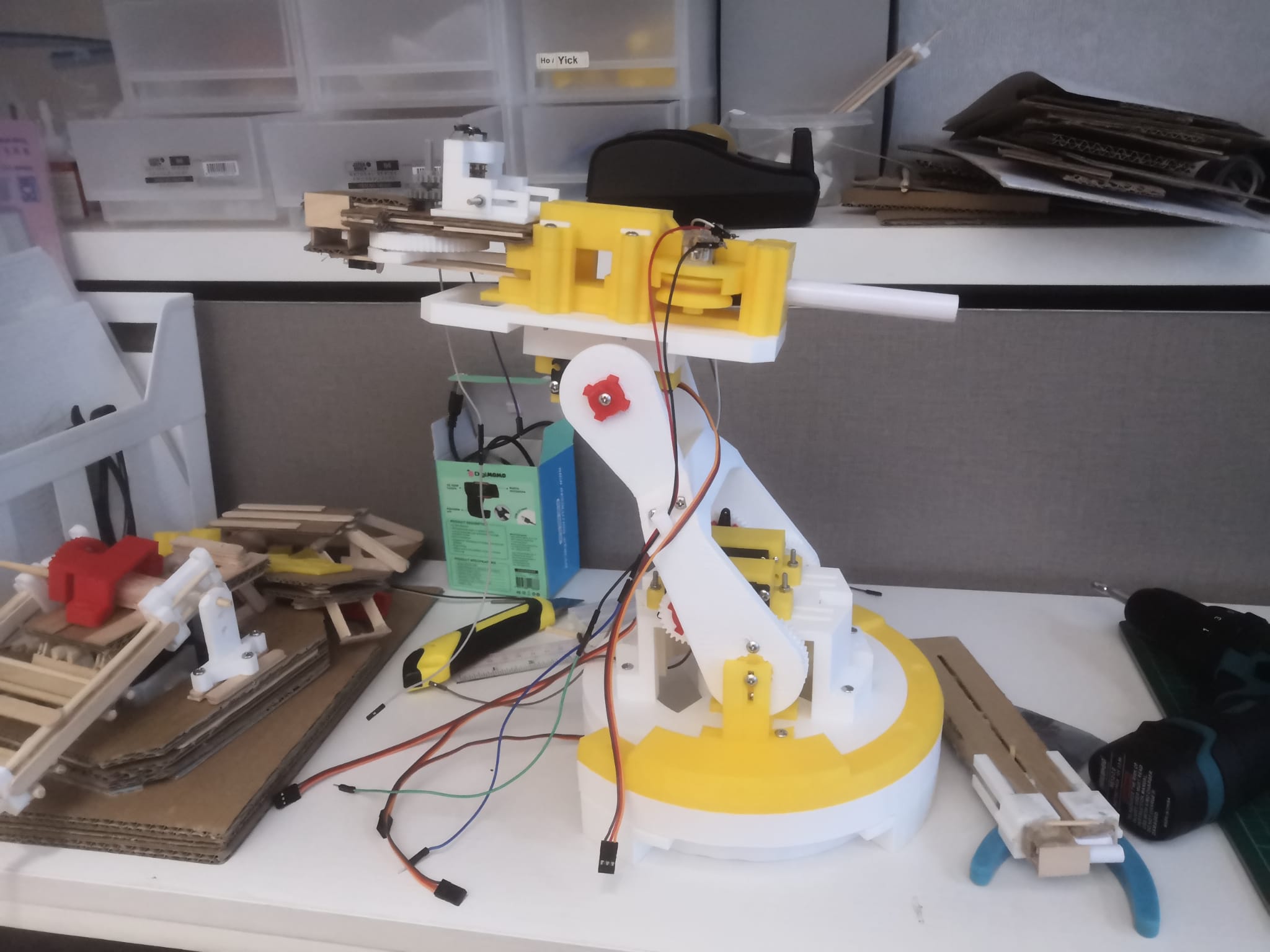
Antenna tracker project
Designed and built a precision antenna tracking system using Arduino microcontrollers and custom gimbal mechanisms to maintain satellite communication during UAV missions. Integrated real-time position calculation and motor control for seamless signal tracking in dynamic flight conditions.
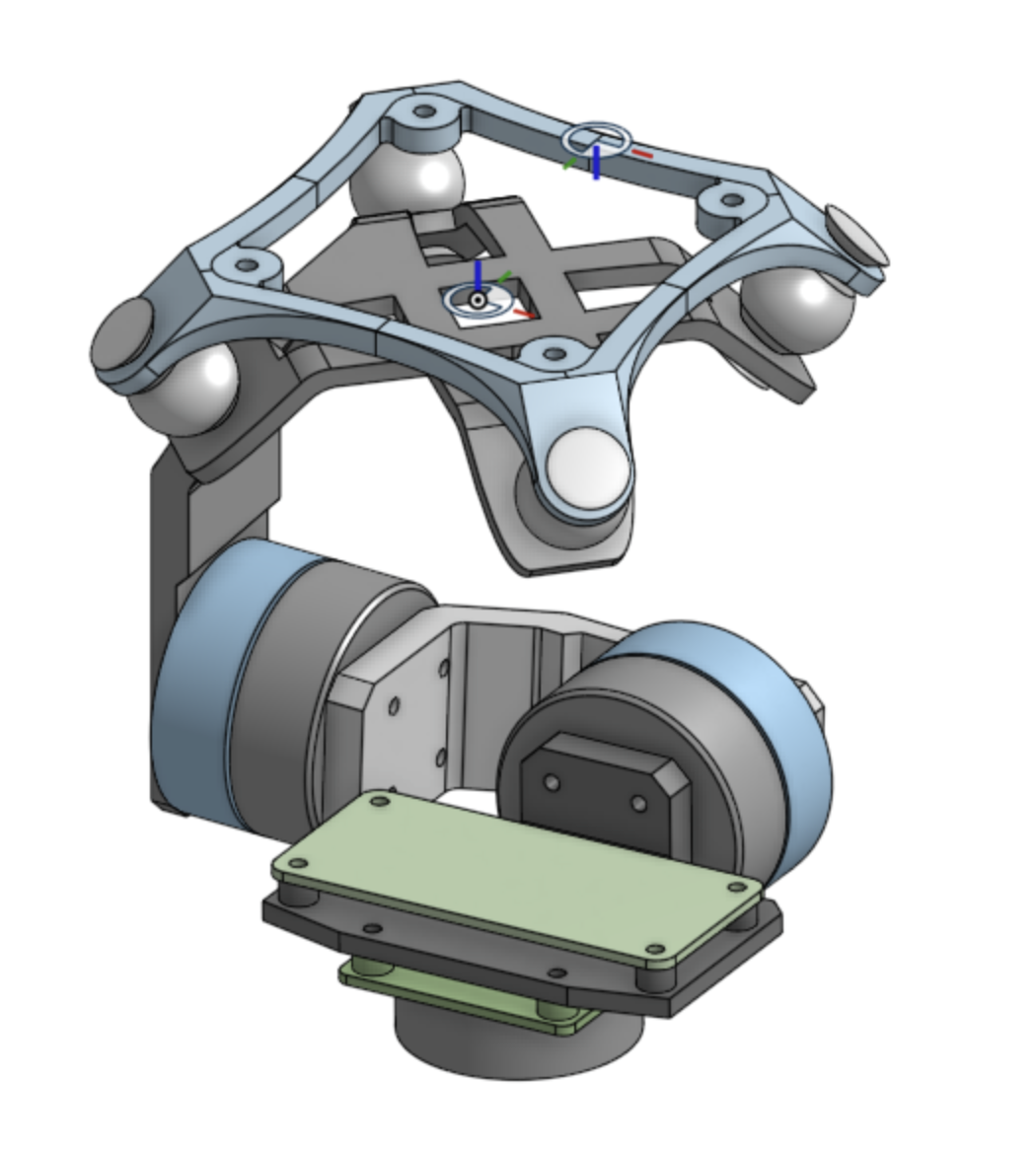
Camera gimbal project
Designed and implemented a complete camera gimbal system capable of maintaining camera stability during autonomous drone missions. The system utilizes an IMU for attitude sensing, custom ESC firmware for precise motor control
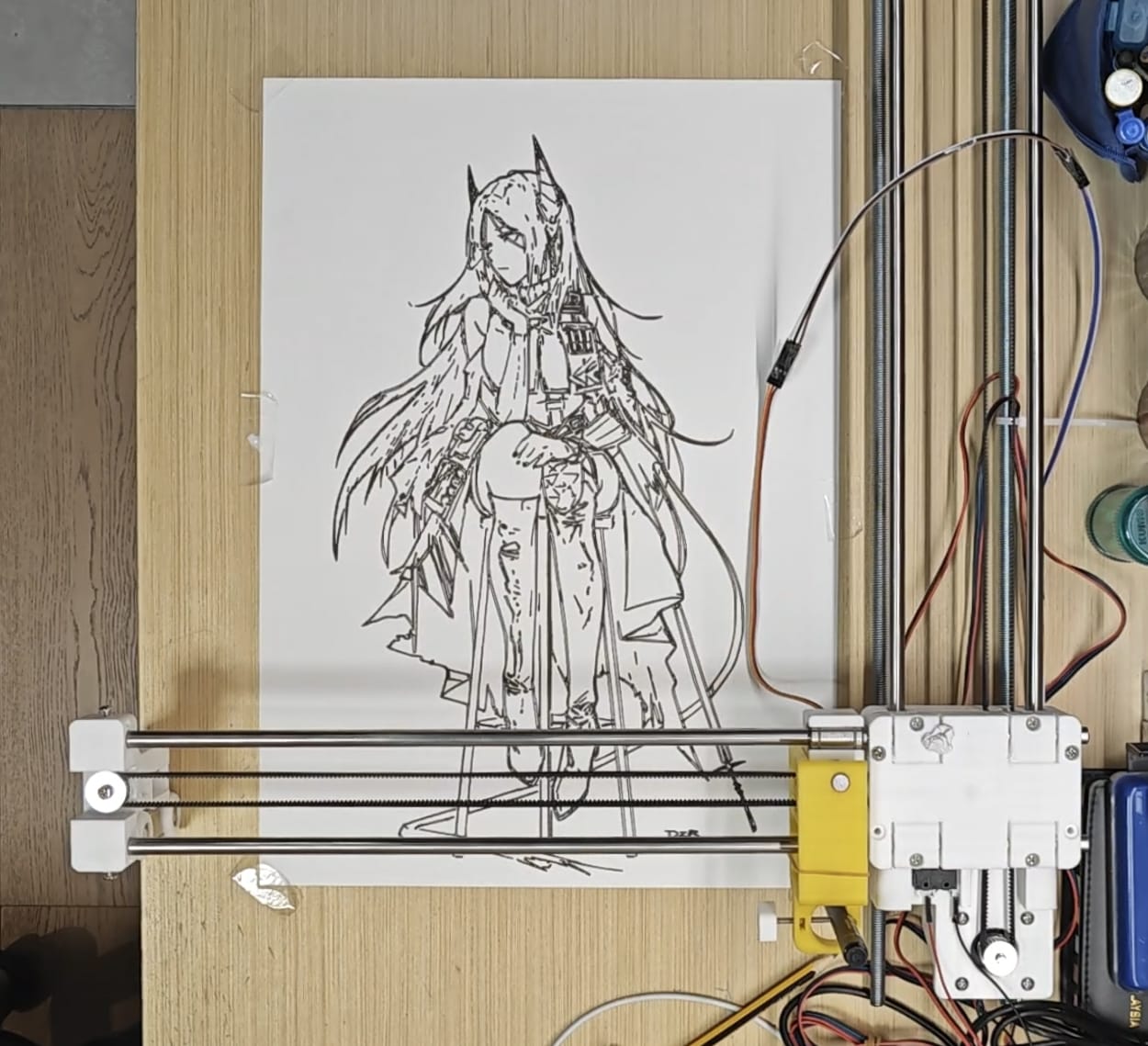
CNC pen plotter project
Arduino-powered drawing machine with GRBL firmware, capable of producing precise line art.
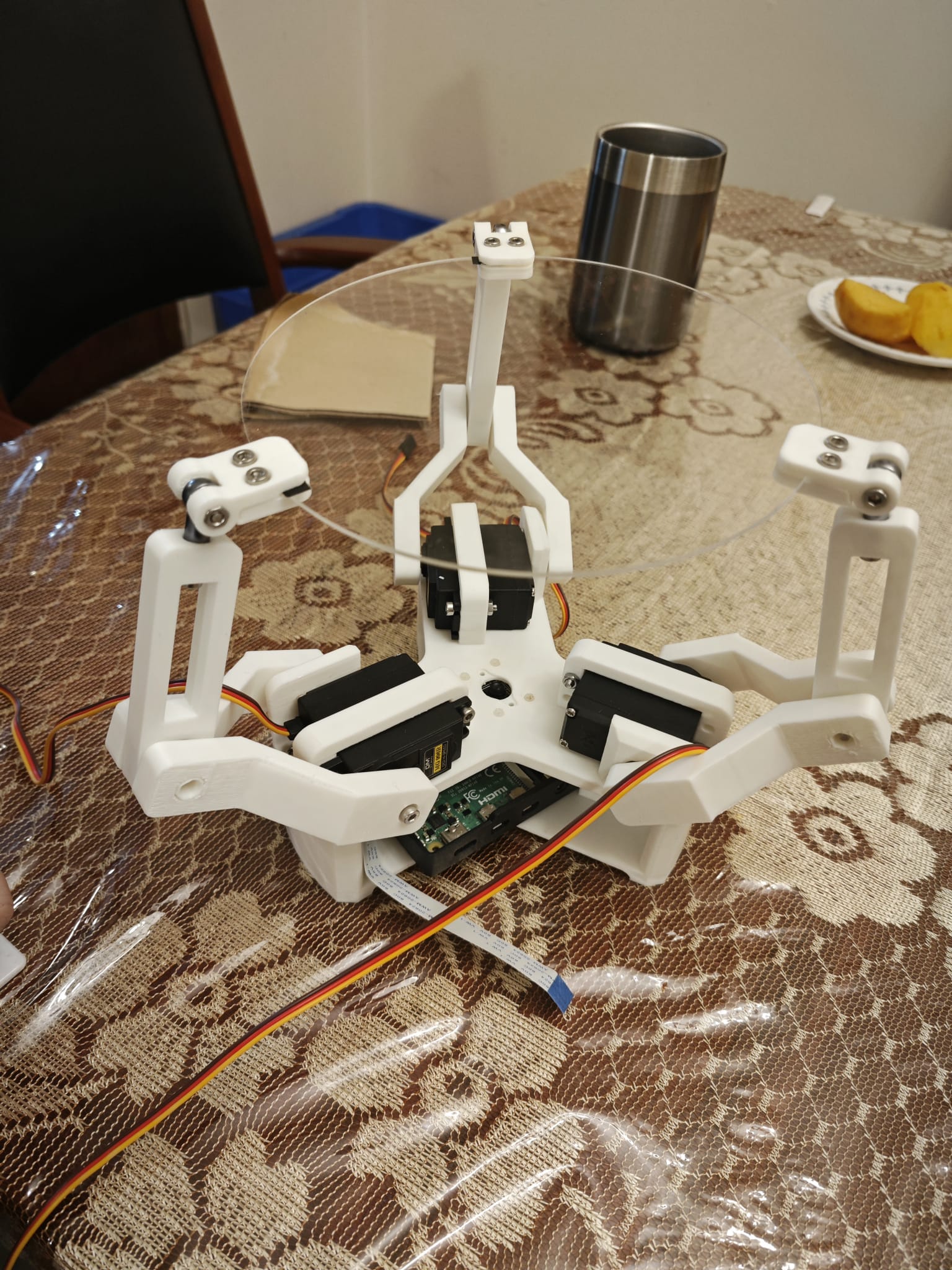
Ball Balancing robot project
Designed and ball-balancing robot that uses a Raspberry Pi 4 with a CV camera to track the ball’s position in real time. The system drives MG9666 servos to adjust the platform’s tilt, keeping the ball centered through a PID control loop. This project combines computer vision, control theory, and mechatronics to demonstrate precise motion control and feedback-driven stability.

Quadcopter projects
Arduino-based, betaflight, arduipilot based drone project exploring flight control systems and UAV design.
RoboCar autonomous project
Built autonomous laps with Donkeycar using both CV/deep-learning and GPS-guided workflows, plus an Arduino-to-ELRS bridge for control integration.
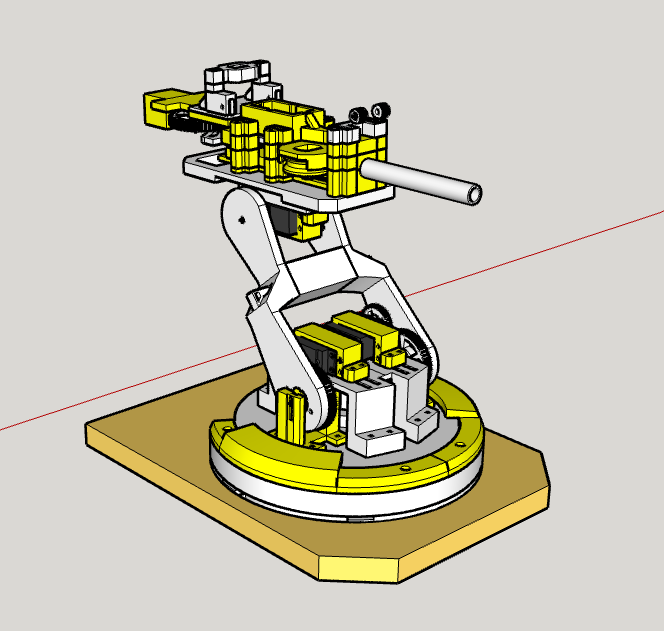
Robot turret project
Arduino-controlled turret that shoots paper darts, paired with a PyQt6 laptop app for control.
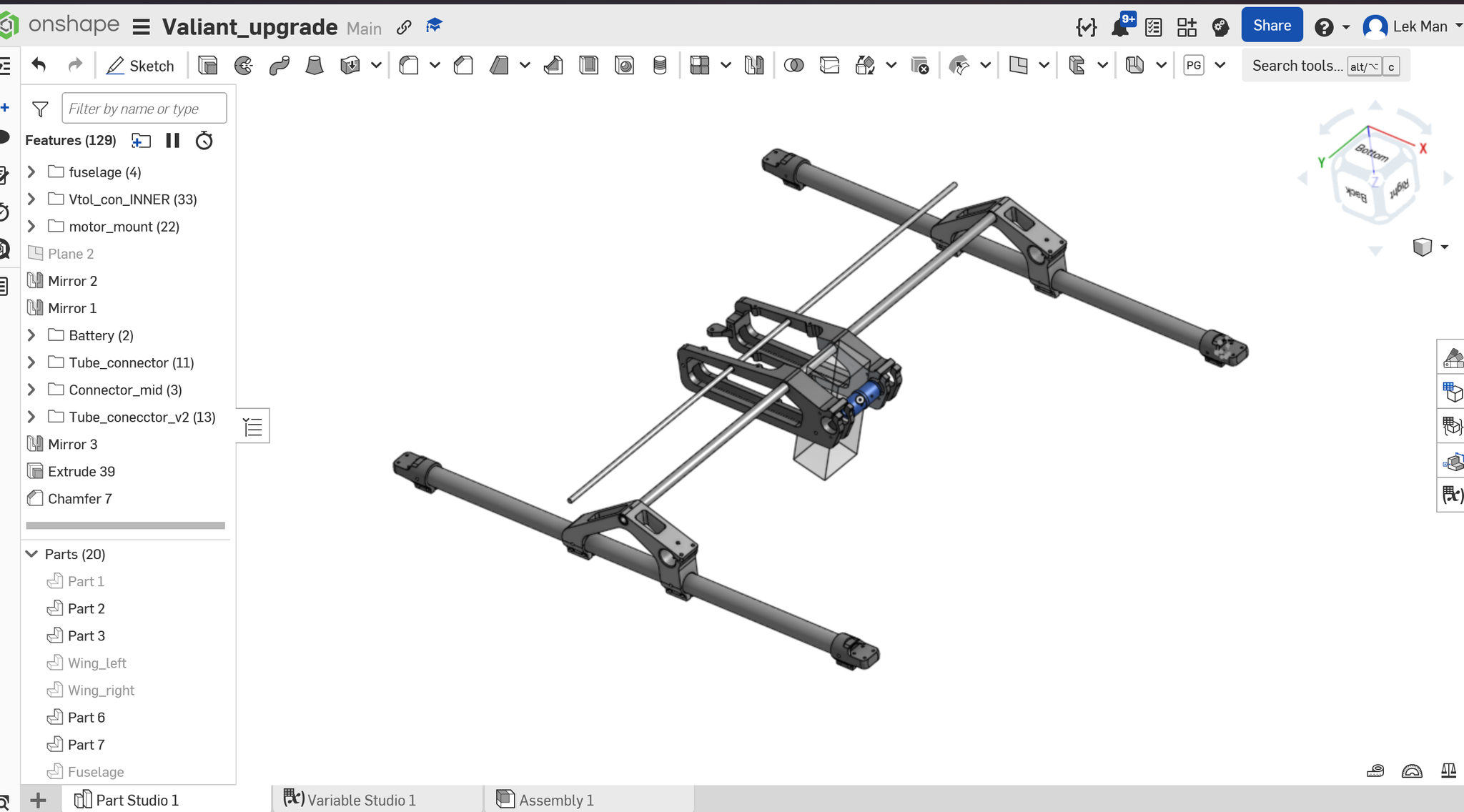
Fixed-Wing to VTOL Conversion
Converting a fixed-wing RC plane into a VTOL aircraft with custom mechanical designs, new powertrain, and a Pixhawk flight controller.
Each project has taught me something new—from problem-solving to teamwork—and pushed me closer to my goal of becoming a well-rounded engineer.