Highlights

10-inch autonomous quadcopter
Ground-up 10-inch UAV build with custom carbon-fiber frame, 8S power system, ArduPilot tuning, and guided autonomous takeoff.

Antenna tracker project
Designed and built a precision antenna tracking system using Arduino microcontrollers and custom gimbal mechanisms to maintain satellite communication during UAV missions. Integrated real-time position calculation and motor control for seamless signal tracking in dynamic flight conditions.

Top 25% - Student UAS competition
Participated in the international Student Unmanned Aerial Systems competition and achieved top 25% ranking against university-level teams.
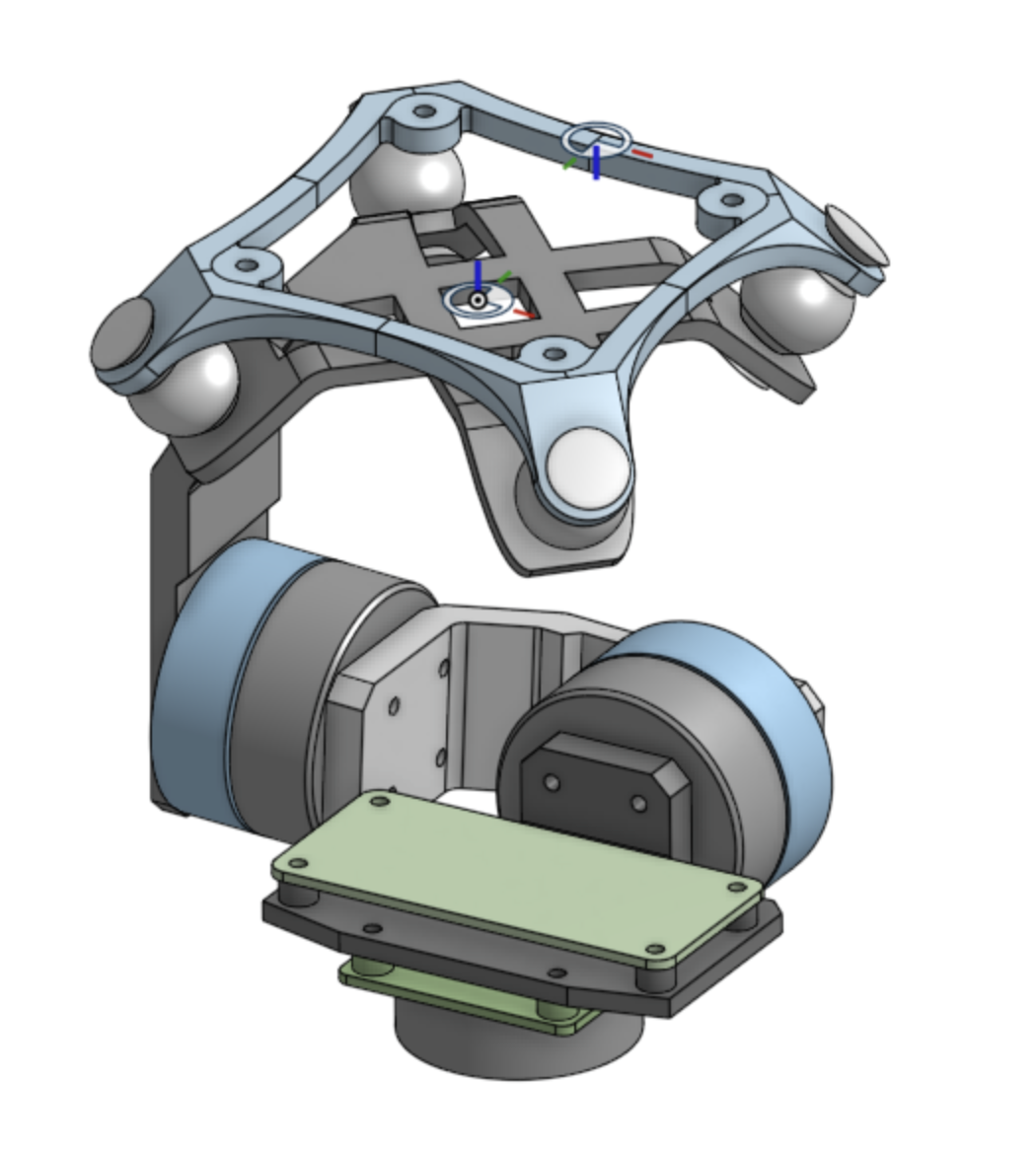
Camera gimbal project
Designed and implemented a complete camera gimbal system capable of maintaining camera stability during autonomous drone missions. The system utilizes an IMU for attitude sensing, custom ESC firmware for precise motor control

Founder - Mechanical Engineering Club
Transformed a struggling Marble Run club into a thriving engineering institution with 20+ members and $7,200 annual budget. Spearheaded projects from automated robot turrets to large-scale marble runs while establishing the club as a permanent STEM fixture through strategic partnerships and school-wide exhibitions.
.jpg)
ERL workshop presenter
Presented the frame-transformation section in an Existential Robotics Lab robotics workshop and supported technical discussions with participants.